
INTRODUCTION
Accessible location-related data to navigate in a complicated indoor environment is essential for all individuals. Navigation in complicated structures, namely hospitals, shopping malls, and airports can be assisted by the increase of kiosks, visual maps, and digital maps ( Unaldi et al., 2023). Nevertheless, visually impaired persons (VIPs) find it difficult to use these aids efficiently. Universally, an estimation stated that 285 million people are to be sightless. Among them, 39 million are blind. For VIPs, independent mobility can cause significant difficulties ( Muaaz et al., 2022). VIPs need directional support or some kind of navigation aid while wandering in public buildings or new environments ( Abdusalomov et al., 2022). The Global Positioning System (GPS) provides robust outdoor navigation solution. Still, the usage of GPS in an indoor setting is impossible, as the satellite signals that it depends on could not enter the walls. Different technologies—such as higher line maps, that is signage information and tactile maps in Braille—are of assistance to VIPs in a difficult atmosphere ( Beheshti et al., 2023). But, not all VIPs can understand and read tactile maps. In addition, these maps have restrictions that include static data regarding the varying environments, and the complexity of VIPs to locate themselves ( Mukhiddinov et al., 2022). A white cane was a glowing physical aid that allowed VIPs to scan their environments for hindrances. Still, it does not find the individual location. The growth of new modern technology, like artificial intelligence and Internet of Things, has unlocked opportunities to provide an interactive scheme to help VIPs to navigate in indoor surroundings independently ( Messaoudi et al., 2022).
In general, Human Activity Recognition (HAR) systems are categorized into radio frequency related, vision related, and wearable sensor related ( Gharghan et al., 2022). In vision-related HAR systems, CV methods are utilized for distinguishing human actions from recorded images or videos. Vision-related HAR system has a higher level of accuracy in identifying human actions, but they do not cope well with variations in the ambient environment. For instance, vision-related systems have limited working region; they need a clear view of the location; users frequently rate them as privacy risk; their performance is liable to change under diverse anthropometric variations and lighting circumstances ( Soto et al., 2022). Instead, wearable sensor-related HAR systems utilize inertial sensors for capturing the dynamic body movement of users while executing various actions. The recorded sensor data are analyzed and processed to detect actions. Wearable sensor-related HAR systems are a feasible substitute for vision-related HAR systems as they are resistant to variations in the ambient atmosphere and do not suffer from privacy risk ( Soto et al., 2022). Still, wearable sensor-related HAR systems are less user-friendly as it need users to wear or carry sensors that is uncomfortable, invasive, and unpleasant for physically and elderly disabled persons ( Bouaziz et al., 2023).
This study presents an improved Beluga Whale Optimization Algorithm with fuzzy-based Indoor Activity Monitoring (IBWOA-FIMS) for elderly and VIPs. The presented IBWOA-FIMS technique mainly focused on the identification and classification of indoor activities of elderly and disabled people. To accomplish this, the IBWOA-FIMS technique employs an adaptive neuro fuzzy inference system (ANFIS) model for the indoor monitoring process. In order to improve the monitoring results of the IBWOA-FIMS technique, IBWOA is used to adjust the parameters related to the ANFIS model. For illustrating the enhanced indoor monitoring results of the IBWOA-FIMS technique, a series of simulations were performed.
RELATED STUDIES
Cardenas et al. (2023) followed a technique to characterize fall events based on the Doppler sign imprinted on the CW probe signals by falling persons. Two neural network (NN) methods are adopted. The first depends on an LSTM and second on CNN. Subramanian and Vasudevan (2021) performed an activity detection task with the hybrid benefits of DL and GA. The video frames captured from camera can be exposed to the genetic change recognition method that finds variations in actions of subsequent frames. Thus, the DL method finds the action of the changed frame. This hybrid method is run on top of a fog-based cloud structure, fogbus. In Hayat et al. (2022), the focus was on supporting elderly persons by observing their actions in diverse outdoor and indoor surroundings by means of accelerometer data and gyroscope data gathered from smart phones. LSTM refers to a RNN variation that can be suitable to manage temporal series.
Borzì et al. (2023) suggest a robust real-time FOG detection method that is easy to apply in stand-alone gadgets functioning in nonsupervised circumstances. The applied system has a multihead CNN that uses diverse spatial resolutions in the study of inertial datasets. The design and the method structures are modeled to offer the best performance while decreasing testing time and computational complexity. In Ashiq et al. (2022), an intelligent and smart scheme was devised for VIPs to ensure their safety and support mobility. The presented system offers navigation in real time by an automated voice. The application makes use of MobileNet’s design for its less computational complexities to run on low-power end gadgets. For object recognition and detection, a deep CNN method was used.
Bauer et al. (2020) introduced a system that can deliver the location of possible problems in outdoor scenarios. First, a depth map of the scene can be assessed from color images that present the 3D data of the environment. Eventually, the 3D and semantic data can be abridged into simple representation of the difficulties the users have. In Syed et al. (2022), a fall detection and activity detection mechanism that did not consider different actions but considered fall detection was presented. After appropriate data augmentation, it can be sent to CNNs for extracting features with an XGB last phase to classify the different output classes.
THE PROPOSED MODEL
In this study, we have focused on the design of the IBWOA-FIMS technique for the detection of indoor activities posed by the elderly and VIPs. The presented IBWOA-FIMS technique mainly focused on the identification and classification of indoor activities of elderly and disabled people. To accomplish this, the IBWOA-FIMS technique comprises a series of processes namely data preprocessing, ANFIS model, and IBWOA-based parameter tuning. Figure 1 represents the overall flow of the IBWOA-FIMS system.

Overall flow of the IBWOA-FIMS system. Abbreviation: IBWOA-FIMS, improved Beluga Whale Optimization Algorithm with fuzzy-based Indoor Activity Monitoring.
Data preprocessing
The data are divided into two subsections for training the ANFIS method and for validating the learning. Performance testing is the usage of independent data that were not utilized for model training. The dataset size can be intricate and small. Then, the K-fold cross-validation method was used. This K-fold approach refers to a resampling process utilized for assessing a DL method related to a limited number of data samples.
Indoor monitoring using the ANFIS model
The IBWOA-FIMS technique employs the ANFIS model for the indoor monitoring process. The ANFIS can be referred to as a five-layered hybrid network comprised of NN and fuzzy logic (FL) models. Zadeh in 1965 proposed the concept of fuzzy inference and FL models in order to improve decision-making against inconsistent, unclear, and inaccurate data ( Jithendra and Sharief Basha, 2023). The task of brain neurons draws motivation for invention of the NN model, otherwise called “connectionism” that represents the usage of neurons connected to human intelligence. In recent times, the neuro-fuzzy system that integrates NN mimic with FL is commonly applied to global concerns and nonlinear problems. Jang proposed the ANFIS model in 1993 as a neuro-fuzzy mechanism, which combines the abilities of modeling NN with FL to stimulate, expertize decision-making process. In the context of ANFIS, spatial structure and ANN’s learning capability are combined by the FL decision-making procedure. Like ANNs, ANFIS performs learning with instances related to the training dataset. ANFIS modeling applies the Takagi-Sugeno fuzzy method that comprises two phases: consequence and premise. The ANFIS method comprises five layers: product, fuzzification, defuzzification, output, and normalization. Figure 2 illustrates the architecture of the ANFIS method.
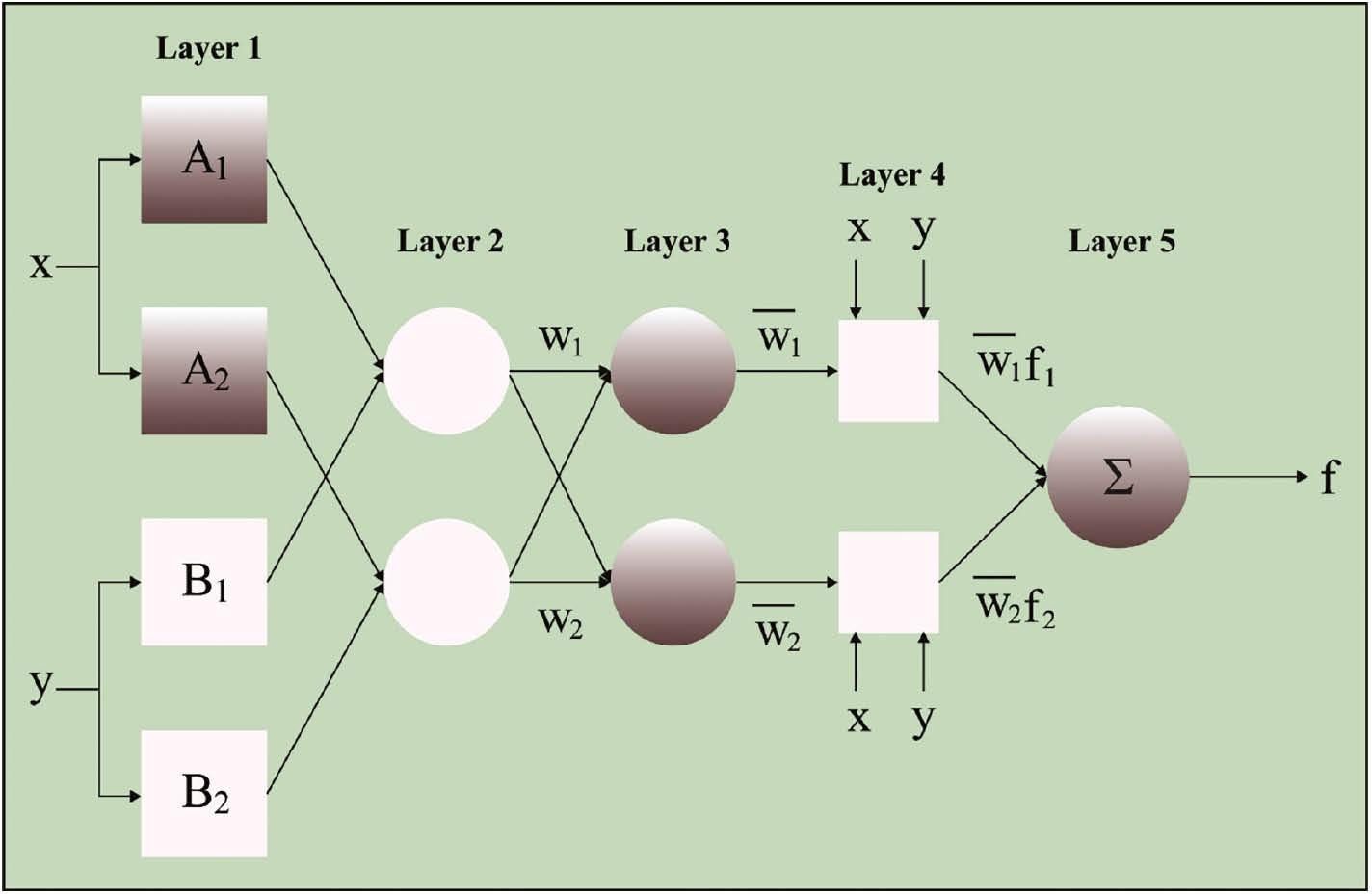
Architecture of the ANFIS model. Abbreviation: ANFIS, adaptive neuro fuzzy inference system.
Layer 1: membership function is used to modify the input value from crisp to the fuzzified value, and each node is adjustable.
Node was selected as
A
1,
A
2,
B
1, and
B
2.
Equations (1) and
(2) provide the fuzzified value for the input. Because of its efficacy, the Sigmoidal MFn was adopted and is represented as
fAn(x).
Layer 2: The output of every node is calculated by multiplying the input connection using fuzzy AND. The node was characterized by π, and Equation (4) is used for computing the outputs.
Layer 3: The fuzzy strength of the second layer was applied for determining the normalized value, and the node of these layers is designated N. During this phase, the normalization process represents the ratio of the present firing strength, and nodes could not be adapted. Equation (5) is used for deriving the solution for these layers that can be formulated as follows:
Layer 4: The defuzzification method is utilized to convert fuzzy output into crisp output. Here, node was adaptive with the node function. Consequently, the output was evaluated by multiplying the prior output as follows:
In
Equation (6),
ˉwi
Layer 5: it is shown that the node was not adaptive and that output can be derived by combining the output of the prior level, as follows:
In this work, gradient descent and least square methods are used to upgrade the parameter in the second and fourth layers. The RSA in the ANFIS model is incorporated for improving the parameters and make them effective based on the prior expertise with evolutionary strategy.
IBWOA-based parameter adjustment
In order to improve the monitoring results of the IBWOA-FIMS technique, IBWOA is used to adjust the parameters related to the ANFIS model. BWOA is a recent swarm-related optimization approach that stimulates the behaviors of the Beluga whales (BWs) while swimming, whale fall, and preying ( Hassan et al., 2023). It can be noted that BWs are social predators that mainly live in groups that comprise 2–25 whales. BWs swim, hunt, and share data to gather an enormous quantity of food, which is made up of codfish, salmon, trout, worms, and shrimp. The exploration and exploitation stages of BWOA are conceptualized from preying, whale fall, and swimming of BWs. For mathematical modeling of BWOA, the position of BW was represented as the search agent that is randomly initialized as follows:
The objective function for all the searching agents can be given as follows:
The exploration stage of BWOA stimulates the swimming behaviors of two pairs of BWs closely together that randomly move in a synchronized or mirrored manner and is listed below:
In
Equation (10),
xr,p1
The exploitation stage of BWOA stimulates the hunting and preying behaviors of BWs where the BWs share the data to cooperatively hunt and gather with respect to the better position of the BW. The Levy flight can be exploited for the movement of BWs to prey catching. The exploitation stage of BWOA related to LFs is statistically defined by the following equation:
In
Equation (11),
Xtbest
L F shows the LF function and it is evaluated using Equation (13):
where
In Equation (14), u and v characterize a random integer, which is uniformly distributed while β denotes a constant value that is equivalent to 1.5. The shift between the exploitation and exploration stage is adjusted by means of adaptive factor that is evaluated as follows:
In Equation (15), B 0 denotes a randomly generated number within [0−1]. If B f > 0.5, the position of BWs is upgraded in the exploration stage while in the case of the value B f ≤ 0.5, the dead BWs fall into the deep seabed. Whale fall indicates that BWs are threatened or haunted by killer whales, polar bears, and humans during migration and foraging. The upgraded position of the BWs is as follows:
where r 5, r 6, and r 7 denote the random numbers in the range 0≤ r 5, r 6, r 7≤1. X step shows the step size of the whale fall that is expressed as follows:
In Equation (17), u b and l b denote the maximal and the minimal boundaries of the control variable, respectively. C 2 indicates a time-varying factor that relies on the population size and probability of whale fall, and it can be shown as below:
in which
In this work, IBWOA is derived by using piece-wise linear chaotic mapping.
While addressing a sophisticated optimization project, the simple random generation of initial population by the BWOA might lead to excessive convergence and quick declines in population diversity in the later iteration ( Zhang and Zhu, 2023). Due to their ergodicity and randomness, chaotic sequence has lately been adopted to improve population diversity in metaheuristic approach. The fundamental method includes mapping chaotic sequence into individual search spaces utilizing chaos methods like Tent, Kent, or Logistic chaos mapping.
Two essential features namely—ergodicity and simplicity—should be taken into account while choosing a chaotic mapping. Segmented linear chaotic mapping fulfills the conditions with its comparatively uniform distribution phase and simple equation than other 1D chaotic systems. The study exploits piece-wise linear chaotic mapping to produce a random sequence with the following dynamical equation:
With the control variable (0, 0.5), the
χi6(0,1)
The fitness selection has become a vital component in the IBWOA method. Solution encoding has been used to assess the candidate solution aptitude. Here, the accuracy value is the main condition employed for designing a fitness function.
where TP denote the a true-positive value and FP signifies a false-positive value.
EXPERIMENTAL EVALUATION
The proposed model is simulated using the Python 3.6.5 tool. The proposed model is experimented on PC i5-8600k, GeForce 1050Ti 4GB, 16GB RAM, 250GB SSD, and 1TB HDD. In this section, the indoor monitoring results of the IBWOA-FIMS technique are examined under five runs of execution.
Table 1 and Figure 3 provide the results offered by the IBWOA-FIMS technique under five runs. Figure 3a indicates the MAE results of the IBWOA-FIMS technique. The results show that the IBWOA-FIMS technique attains MAE values of 0.74, 0.76, 0.44, 0.53, and 0.55 under runs 1-5, respectively. Figure 3b portrays the MSE results of the IBWOA-FIMS method. The outcomes shown that the IBWOA-FIMS method achieves MSE values of 0.63, 0.57, 0.63, 0.66, and 0.61 under runs 1-5, correspondingly. Figure 3c specifies the accu y results of the IBWOA-FIMS method. The results show that the IBWOA-FIMS algorithm obtains accu y of 98.43, 95.54, 97.75, 96.70, and 97.20% under runs 1-5, correspondingly.
Classifier outcome of the IBWOA-FIMS approach under varying runs.
| No. of runs | MAE | MSE | Accuracy (%) |
|---|---|---|---|
| Run1 | 0.74 | 0.63 | 98.43 |
| Run2 | 0.76 | 0.57 | 95.54 |
| Run3 | 0.44 | 0.63 | 97.75 |
| Run4 | 0.53 | 0.66 | 96.70 |
| Run5 | 0.55 | 0.61 | 97.20 |
| Average | 0.60 | 0.62 | 97.13 |
Abbreviation: IBWOA-FIMS, improved Beluga Whale Optimization Algorithm with fuzzy-based Indoor Activity Monitoring.

Classifier outcome of the IBWOA-FIMS system: (a) MAE, (b) MSE, and (c) Accu y . Abbreviation: IBWOA-FIMS, improved Beluga Whale Optimization Algorithm with fuzzy-based Indoor Activity Monitoring.
In Table 2 and Figure 4, a brief comparative result of the IBWOA-FIMS technique is highlighted. Figure 4a illustrates the MAE results of the IBWOA-FIMS technique with existing models ( Mahida et al., 2020). The results indicate that the IBWOA-FIMS technique accomplishes an effective MAE of 0.60 m. On the other hand, the DL-Adam, DL-Adamax, DL-RMSProp, and DL-Adagrad models obtain ineffective MAE values of 0.71, 0.84, 1.04, and 5.59 m, respectively. Figure 4b exhibits the MSE results of the IBWOA-FIMS method with existing approaches. The outcomes point out that the IBWOA-FIMS method achieves an effective MSE of 0.62 m. On the other hand, the DL-Adam, DL-Adamax, DL-RMSProp, and DL-Adagrad algorithms obtain ineffective MSE values of 1.70, 1.81, 3.39, and 3.62 m, correspondingly. Figure 4c shows the accu y results of the IBWOA-FIMS approach with existing methods. The figure specifies that the IBWOA-FIMS method accomplishes an effective accu y of 97.13%. Conversely, the DL-Adam, DL-Adamax, DL-RMSProp, and DL-Adagrad algorithms acquire ineffective accu y of 95.34, 94.67, 94.01, and 85.90%, correspondingly.
Comparative outcome of the IBWOA-FIMS approach with other existing approaches.
| Methods | MAE (m) | MSE (m) | Accuracy (%) |
|---|---|---|---|
| IBWOA-FIMS | 0.60 | 0.62 | 97.13 |
| DL-Adam | 0.71 | 1.70 | 95.34 |
| DL-Adamax | 0.84 | 1.81 | 94.67 |
| DL-Rmsprop | 1.04 | 3.39 | 94.01 |
| DL-Adagrad | 5.59 | 3.62 | 85.90 |
Abbreviation: IBWOA-FIMS, improved Beluga Whale Optimization Algorithm with fuzzy-based Indoor Activity Monitoring.

Comparative outcome of the IBWOA-FIMS system: (a) MAE, (b) MSE, and (c) Accu y . Abbreviation: IBWOA-FIMS, improved Beluga Whale Optimization Algorithm with fuzzy-based Indoor Activity Monitoring.
Figure 5 inspects the accuracy of the IBWOA-FIMS method in the training and validation on the test database. The result shows that the IBWOA-FIMS technique has greater accuracy values over higher epochs. Additionally, the higher validation accuracy over training accuracy portrayed that the IBWOA-FIMS method learns productively on the test database.

Accuracy curve of the IBWOA-FIMS system. Abbreviation: IBWOA-FIMS, improved Beluga Whale Optimization Algorithm with fuzzy-based Indoor Activity Monitoring.
The loss analysis of the IBWOA-FIMS technique in training and validation is shown on test database in Figure 6. The figure highlights that the IBWOA-FIMS technique reaches adjacent values of training and validation loss. The IBWOA-FIMS technique learns productively on the test database.

CONCLUSION
In this study, we have focused on the design of the IBWOA-FIMS technique for the detection of indoor activities posed by the elderly and VIPs. The presented IBWOA-FIMS technique mainly focused on the identification and classification of indoor activities of elderly and disabled people. To accomplish this, the IBWOA-FIMS technique employs the ANFIS model for the indoor monitoring process. In order to improve the monitoring results of the IBWOA-FIMS technique, IBWOA is used to adjust the parameters related to the ANFIS model. For illustrating the enhanced indoor monitoring results of the IBWOA-FIMS technique, a series of simulations were performed. The simulation values portrayed the betterment of the IBWOA-FIMS technique in terms of different metrics.