
INTRODUCTION
Currently, in metropolitan areas, intelligent transportation systems were devised to help decrease traffic, the rate of injuries, accidents, and deaths, diminish environmental pollution, and reduce fuel consumption, etc. ( Khan et al., 2022). Such structures use diverse technologies [deep learning (DL), Internet of Things, image processing, and neural network (NN)] for many applications. Alternatively, technology companies (namely Tesla and Google) are attempting to develop self-driving cars that could offer safe travel for persons while the driver is sleepy, which could save his life along with other travelers’ lives, with automatic control cars to avoid accidents ( Pustokhina et al., 2021). Such automobiles should be fortified with sensors for sensing the atmosphere, finding objects close to the car, and notifying the driver, and have actuators to do real-time processes while the driver is sleepy or fails to pay attention to hazards to avoid accidents ( Mansour et al., 2021). Intelligent transportation systems were advanced for real-time operations and automatic road management in the situation of a natural accident (like an icy road, a mountain fall, and an avalanche) or unnatural disasters (namely car traffic accidents and road repairs) ( Chang et al., 2022). Such systems utilize sensors as a tool to understand and find the state of travel atmosphere. The data gathered by such sensors by means of communication technologies [dedicated short-range communication (DSRC and WiFi)] to other vehicles on the route are transferred to control centers ( Khan et al., 2022).
The captured visual data have details that are precise when compared with substitute data sources namely radar signals, global positioning system (GPS), mobile transmission, etc. ( Avola et al., 2022). In addition, it serves a main role in predicting accidents and other abnormal actions by collecting particulars concerning road traffic circumstances. The usage of closed-circuit television (CCTV) is useful in different real-time applications like accidental falls and grade crossing trespassing ( Sabuhi et al., 2021). Several computer vision (CV) relies on works were modeled by focusing processes namely behavioral learning, data acquisition, and feature extraction. The intention of studies is to calculate processes like vehicle prediction and observation, scene detection, anomaly prediction approaches, activity examination, multi camera-relied schemes and difficulties, video processing models, traffic observation, and human behavior learning ( Dey et al., 2019). Now, anomalous prediction is a sub-field of behavior learning from captured visual scenes. Machine learning (ML) refers to a domain of artificial intelligence (AI) that utilizes statistical approaches to learn hidden patterns from prevailing data and to make decision regarding unobserved records ( Abdullah and Jalal, 2023). The core task of machine learners is constructing a general model on the possible dispersal of training samples and generalizing experience to unseen instances. The learning procedure relies upon the data quality exhibited ( Aldayri and Albattah, 2022). An instance is presented in a dataset with various properties. Inappropriately, mining proficient features seems to be hard for a few tasks.
This manuscript presents a new sine cosine algorithm with deep learning-based anomaly detection in pedestrian walkways (SCADL-ADPW) method. The SCADL-ADPW techniques focus on the identification and classification of anomalies, i.e. vehicles in the pedestrian walkways of visually impaired people (VIP). To accomplish this, the SCADL-ADPW technique uses the VGG-16 model for feature vector generation. In addition, the SCA approach is designed for the optimal hyperparameter tuning process. For anomaly detection, long short-term memory (LSTM) method can be exploited. The experimental results of the SCADL-ADPW technique are studied on the UCSD anomaly detection dataset.
RELATED WORKS
Yang et al. (2018) devised to seize convolutional neural network (CNN)-related per-pixel semantic segmenters to cover navigational perception necessities in a unified way. It is not critical to observe crosswalk location or traffic light signals, but analyze the states of other vehicles and pedestrians. At the centroid of unification proposal is a DL structure, aspired to achieve robust and potential semantic understanding. Shimakawa et al. (2019) deal with obstacle recognition to support VIP walks. Previous studies had adopted a method of utilizing some image processing methods for finding the steps of staircase on depth imageries by an RGB-D camera. Still, it was hard to carry the RGB-D camera. This study implemented CNN, a type of DL approach to hindrance detection, and advanced an application program functioning on smartphones.
Lin et al. (2018) devised a visual localizer that has global optimization and ConvNet descriptor for attaining strong visual localization for aided navigation. Through concatenation of two compressed convolution layers of GoogLeNet, thousands of bytes are utilized for denoting image proficiently. Hsieh et al. (2021) developed an assistive mechanism to help VIP walk outdoors. Depending on the depth map acquired by ZED 2 and CNN-NN-FAST-SCNN, the image of the environment in front of the VIP can be devised into seven equal divisions.
Bhattacharya and Asari (2021) devised a method that incorporated wearable devices and Android devices to support VIP and make it simpler to navigate safely. The glove sync and the Android device are connected through Bluetooth connection, and the vibration actuator needs haptic feedback from the user based on the instruction from the paired devices. Le et al. (2022) recommend a novel BGN for camera-related recognition of pedestrian lanes in unstructured scene. For the VIP safety, along with an output segmentation map, network provided two complete-resolution maps of epistemic and aleatoric uncertainty in addition to well-calibrated confidence measure.
PROPOSED ANOMALY DETECTION MODEL
In this manuscript, we have devised a new SCADL-ADPW technique for anomaly detection purposes. The proposed SCADL-ADPW technique identifies the occurrence of anomalies in the pedestrian walkways on remote sensing images. The SCADL-ADPW techniques focus on the identification and classification of anomalies, i.e. vehicles in the pedestrian walkways of VIP. Figure 1 represents the workflow of the SCADL-ADPW algorithm.
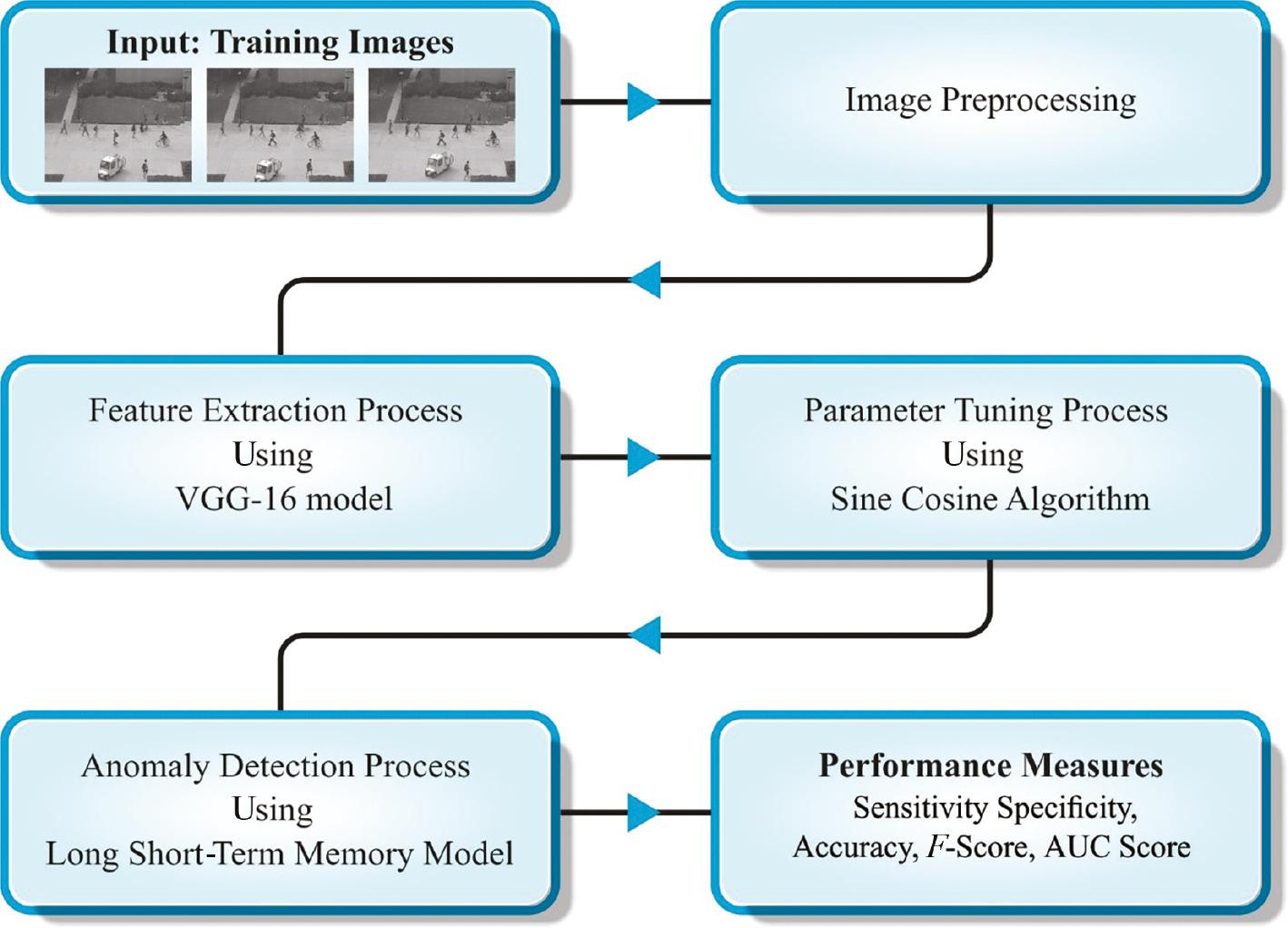
Workflow of the SCADL-ADPW approach. Abbreviation: SCADL-ADPW, sine cosine algorithm with deep learning-based anomaly detection in pedestrian walkways.
Feature extraction module
The SCADL-ADPW techniques use the VGG-16 model for feature vector generation. The VGG-16 is the essential basis of CNN ( Deepa and Chokkalingam, 2022). VGG designs and trains object detection where the most important CNN is VGG-16. In 2015, Google researchers introduce the InceptionV3 network. The high computation cost related to CNN can be overcome by the pretrained structure namely VGG-16. Figure 2 illustrates the infrastructure of VGG-16. In the presented method, the pooling, convolution, output and fully connected layers are the four main elements included in CNNs.

Convolutional layer
The building block in CNNs are a convolution layer. The convolution-related method convert inputs into outputs. The fixed height and width with plane composes the input volume. The depth D can be determined by number of planes. The amount of M planes with the volume structures presented in the convolution layer. The amount of filters or kernels with a small size (K) determines all the planes. The weight with filter size is 3 × 3. Y K shows the matrix value in terms of k th input plane.
where w kl denotes the parametric weight. Over kth input planes, the 2D matrix w kl * Y k is generated by means of convolution of these filters. The F activation function transform the outcome and bias function b l .
The feature map resultant matrix X l . The feature map denotes M. In this work, the activation function was ReLU. While keeping all the positive input, it changes every value of input to 0.
The convolution layer output employs the ReLU function. The network learning speed and classification accuracy improved.
Pooling layer
The feature map size can be decreased by means of the pooling layer after all the blocks of a layer or convolution layer. The crucial data are preserved while avoiding inappropriate details. The squared section and the stride (s) of feature map size ( F) are the two crucial parameter to determine pooling.
The s = 2 and F = 2 with five pooling layers existing in VGG-16. The block organizes 13 convolution layers which comprise the VGG-16.
Fully connected and output layer
Attain feature map set afterwards the successive and pooling convolution layer. The input–output function implemented by all the neurons of the fully connected (FC) layer is represented as follows:
Therefore, the w j and Y j neuron denote input features and neuron weight. The FC layer output is Z:
The probability distribution outcome can be attained by using the output layer of all the node’s outcomes.
Hyperparameter tuning module
Here, the SCA approach is designed for the optimal hyperparameter tuning process. SCA is a population-based optimization technique which creates several initial choices and enables them to fluctuate toward optimum solution through the sin and cos operators ( Pham and Nguyen, 2023). The optimization method of population-related optimization algorithm split into two stages: exploration and exploitation.
The exploitation and exploration stages are as follows:
where r 4 shows the random value in [0,1].
The key parameters are r 1, r 2, r 3, and r 4.
r 1 determines various directions within space between the solution and the space outside the solution or the destination.
r 2 provides distance to travel toward or outward the destination.
r 3 shows random weight to emphasize weight of the exploitation ( r 3 < 1) or exploration ( r 3 > 1).
Effect of sin and cos functions in Eqs. (5) and (6). Eqs. (5) and (6) determine the spatial area between two solutions in the search range. But, the search space was expanded to high dimension. The cyclical model of sin and cos functions enables relocating around various solutions. This method guarantees exploitation of space determined among two solutions.
Furthermore, to avoid local optima, solution should be searched outside the space between the solution and the destination.
The range of sin and cos functions in Eqs. (5) to (6) is changed to balance the exploration and exploitation stages:
In Eq. (8), t denotes the existing iteration, and T shows the maximum amount of iterations.
Anomaly detection module
For anomaly detection, the LSTM model is utilized. The key features of LSTM-NN involve the usage of gating modules to optimize the problem of RNN being incapable of transmitting prior data for a longer time, resolve the problems of gradient exploding and vanishing at longer sequence training, and accomplish long-term time series learning ( Hong and Tian, 2023). It includes forgetting, input, and output gates that could selectively learn input data and store relevant data in the storage unit. LSTM is often employed in different domains like speech recognition, unmanned driving, intelligent robots, etc.
where C t –1 and C t correspondingly signify the cell state at t–1 and t time, c t denotes the cell status update value at t time, h t –1 and h t correspondingly characterize the output at t−1 and t time, 0 t , i t and f t signify output, input, and forgetting gates, correspondingly; X t shows the input at t time, 0 t , i t and f t denotes each matrix within [0,1] tanh and σ denotes activation functions. σ shows the sigmoid function that is S-type function could map the output of real number. The tanh function ranges within (–1,1). w 0, w j , and w f correspondingly signify the weight matrices of the three gates; b 0, b i, and b f signify the bias terms of the three gating functions.
Based on the abovementioned derived equations and LSTM structure diagram, the input of LSTM-NN at t time can be defined using the input X t at the existing time and output h t –1 at t−1 time. The cell status update value c t at t time can be defined using i t input gate that can be used for selecting relevant data for updating unit state C t . The forget gate f t is used for controlling cell state at t−1 time and filter storage data.
The joint effect of f t and i t forgetting and input gates is to forget worthless data and update relevant data for obtaining unit state C t at time t. The output gate 0 t can be leveraged for controlling the cell state C t at t time. Initially, the tanh function maps the value of the C t cell state at (–1,1); then the input gate o t analyzes the output h t at t time.
EXPERIMENTAL EVALUATION
The proposed model is simulated using Python 3.6.5 tool on PC i5-8600k, GeForce 1050Ti 4GB, 16GB RAM, 250GB SSD, and 1TB HDD. The parameter settings are given as follows: learning rate: 0.01, dropout: 0.5, batch size: 5, epoch count: 50, and activation: ReLU.
In this section, the anomaly recognition in pedestrian walkways results is examined on the UCSD anomaly detection dataset. Figure 3 illustrates the sample images.

In Table 1 and Figure 4, the recognition accuracy of the SCADL-ADPW approach is examined with current methods on the Test004 dataset. The outcomes guaranteed the improvement of the SCADL-ADPW technique on the detection process. S-40 sequence had an increased detection accuracy of 99.11%, while the DLADT-PW, RS-CNN, Fast R-CNN, and MDT methods have reported decreased detection accuracy of 96, 92.51, 80.41, and 78.21% respectively. Likewise, on S-46 sequence, an increased detection accuracy of 99.85% was observed, while the DLADT-PW, RS-CNN, Fast R-CNN, and MDT methodologies have reported decreased detection accuracy of 98.14, 96.60, 85.17, and 75.48% respectively. Similarly, on S-106 sequence, an increased detection accuracy of 99.23% was observed, while the DLADT-PW, RS-CNN, Fast R-CNN, and MDT methodologies have reported decreased detection accuracy of 97.62, 100.55, 90.77, and 82.73% respectively. Eventually, S-137 sequence had an increased detection accuracy of 99.37%, while the DLADT-PW, RS-CNN, Fast R-CNN, and MDT methods have reported decreased detection accuracy of 98.04, 99.49, 90.81, and 84.76%, respectively. Finally, on S-180 sequence, an increased detection accuracy of 99.10% was observed, while the DLADT-PW, RS-CNN, Fast R-CNN, and MDT methods had decreased detection accuracy of 99.39, 99.42, 85.96, and 84.24%, respectively.
Recognition accuracy of the SCADL-ADPW approach with other systems on Test004 dataset.
| Test004 | |||||
|---|---|---|---|---|---|
| Sequences | DLADT-PW | RS-CNN | Fast R-CNN | MDT | SCADL-ADPW |
| S-40 | 96.00 | 92.51 | 80.41 | 78.21 | 99.11 |
| S-42 | 97.31 | 94.10 | 81.55 | 77.17 | 99.57 |
| S-46 | 98.14 | 96.60 | 85.17 | 75.48 | 99.85 |
| S-51 | 98.18 | 96.39 | 80.88 | 90.68 | 99.44 |
| S-75 | 99.81 | 99.74 | 76.92 | 81.66 | 99.15 |
| S-106 | 97.62 | 100.55 | 90.77 | 82.73 | 99.23 |
| S-123 | 96.52 | 97.93 | 90.97 | 87.77 | 99.32 |
| S-135 | 99.67 | 99.16 | 91.05 | 81.93 | 99.78 |
| S-136 | 96.92 | 97.61 | 93.98 | 83.39 | 99.52 |
| S-137 | 98.04 | 99.49 | 90.81 | 84.76 | 99.37 |
| S-149 | 98.79 | 99.42 | 84.06 | 80.15 | 99.61 |
| S-158 | 98.78 | 99.25 | 78.58 | 78.54 | 99.77 |
| S-177 | 97.87 | 98.12 | 79.05 | 76.71 | 98.91 |
| S-178 | 98.07 | 100.12 | 82.81 | 76.59 | 99.16 |
| S-180 | 99.39 | 99.42 | 85.96 | 84.24 | 99.10 |
| Average | 98.07 | 98.03 | 84.86 | 81.33 | 99.24 |
Abbreviation: SCADL-ADPW, sine cosine algorithm with deep learning-based anomaly detection in pedestrian walkways.
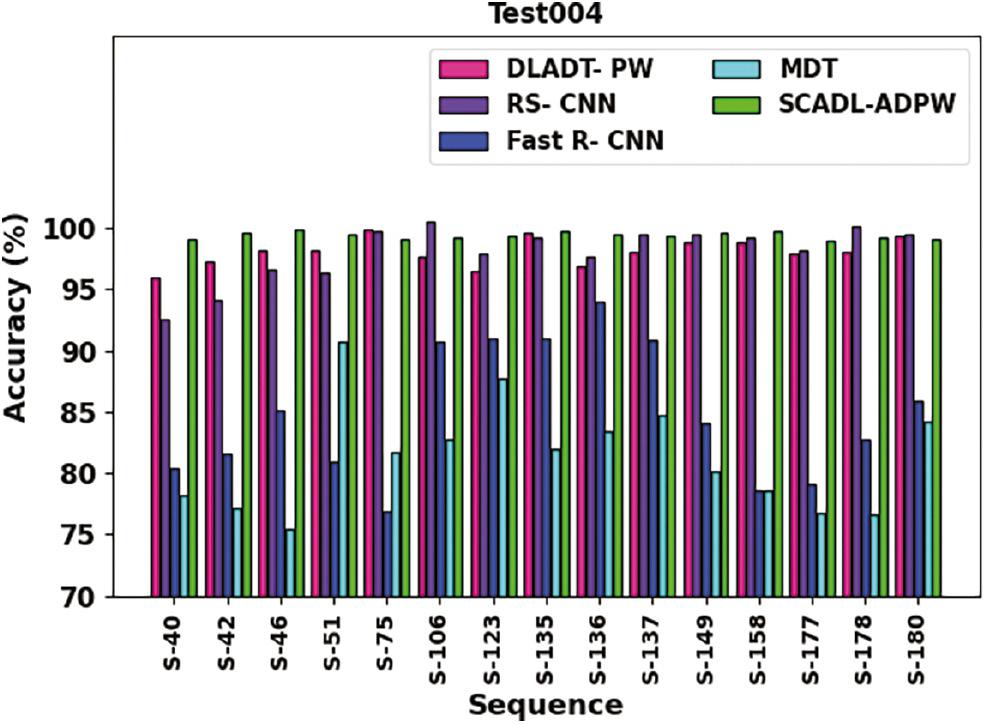
Accu y outcome of the SCADL-ADPW approach on Test004 dataset. Abbreviation: SCADL-ADPW, sine cosine algorithm with deep learning-based anomaly detection in pedestrian walkways.
In Table 2 and Figure 5, the recognition accuracy of the SCADL-ADPW approach is inspected with current approaches on the Test004 dataset. The results guaranteed the improvement of the SCADL-ADPW technique on the detection process. On S-40 sequence, an increased detection accuracy of 96.78% was observed, while the DLADT-PW, RS-CNN, Fast R-CNN, and MDT methods had decreased detection accuracy of 99.36, 97.44, 92.26, and 87.73%, respectively. Similarly, on S-46 sequence, an increased detection accuracy of 96.97% was observed, while the DLADT-PW, RS-CNN, Fast R-CNN, and MDT methodologies have reported decreased detection accuracy of 99.89, 99.91, 95.76, and 89.31%, correspondingly. Likewise, on S-106 sequence, an increased detection accuracy of 96.35% was observed, while the DLADT-PW, RS-CNN, Fast R-CNN, and MDT methods had decreased detection accuracy of 89.42, 86.97, 85.98, and 85.46%, correspondingly. Eventually, S-137 sequence had an increased detection accuracy of 96.80%, while the DLADT-PW, RS-CNN, Fast R-CNN, and MDT algorithms had decreased detection accuracy of 88.96, 85.52, 84.48, and 83%, respectively. Finally, S-180 sequence had an increased detection accuracy of 96.47%, while the DLADT-PW, RS-CNN, Fast R-CNN, and MDT systems had decreased detection accuracy of 90.05, 86.15, 83.47, and 83.78%, correspondingly.
Recognition accuracy of the SCADL-ADPW approach with other systems on Test007 dataset.
| Test007 | |||||
|---|---|---|---|---|---|
| Sequence | DLADT-PW | RS-CNN | Fast R-CNN | MDT | SCADL-ADPW |
| S-40 | 99.36 | 97.44 | 92.26 | 87.73 | 96.78 |
| S-42 | 99.15 | 98.77 | 95.21 | 88.18 | 96.14 |
| S-46 | 99.89 | 99.91 | 95.76 | 89.31 | 96.97 |
| S-51 | 99.02 | 98.32 | 94.59 | 85.60 | 96.78 |
| S-75 | 96.59 | 96.01 | 91.31 | 87.57 | 96.32 |
| S-106 | 89.42 | 86.97 | 85.98 | 85.46 | 96.35 |
| S-123 | 99.16 | 99.44 | 95.08 | 91.38 | 96.65 |
| S-135 | 99.13 | 98.67 | 97.13 | 84.64 | 96.18 |
| S-136 | 86.85 | 86.68 | 82.49 | 77.64 | 96.77 |
| S-137 | 88.96 | 85.52 | 84.48 | 83.00 | 96.80 |
| S-149 | 76.64 | 70.81 | 58.48 | 56.15 | 96.93 |
| S-158 | 96.81 | 90.84 | 85.80 | 84.07 | 96.15 |
| S-177 | 82.82 | 76.23 | 72.65 | 64.98 | 96.95 |
| S-178 | 81.53 | 75.88 | 66.15 | 64.45 | 96.65 |
| S-180 | 90.05 | 86.15 | 83.47 | 83.78 | 96.47 |
| Average | 92.36 | 89.84 | 85.39 | 80.93 | 96.59 |
Abbreviation: SCADL-ADPW, sine cosine algorithm with deep learning-based anomaly detection in pedestrian walkways.
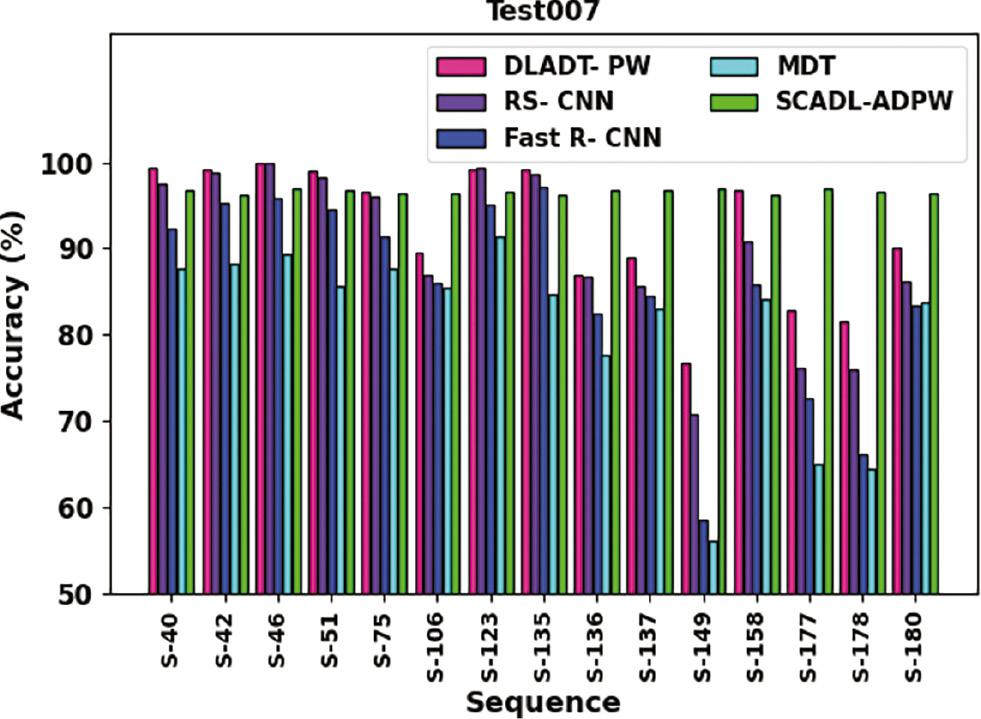
Accu y outcome of the SCADL-ADPW approach on Test007 dataset. Abbreviation: SCADL-ADPW, sine cosine algorithm with deep learning-based anomaly detection in pedestrian walkways.
The overall anomaly detection results of the SCADL-ADPW technique have been compared with other DL models in Table 3 and Figure 6 ( Pustokhina et al., 2021). The outcomes notify the improved average accuracy results over other models. On the Test004 dataset, the SCADL-ADPW technique achieves improved average accu y of 99.24% while the RS-CNN, Fast R-CNN, MDT, and MPPCA techniques attain decreased average accu y of 98.07, 98.03, 84.86, and 81.33%, respectively. Besides, on the Test007 dataset, the SCADL-ADPW method achieves improved average accu y of 96.59%, while the RS-CNN, Fast R-CNN, MDT, and MPPCA approaches decreased average accu y of 92.36, 89.84, 85.39, and 80.93%, respectively.
Average accuracy of the SCADL-ADPW approach with other systems on two datasets.
| Techniques | RS-CNN | Fast R-CNN | MDT | MPPCA | SCADL-ADPW |
|---|---|---|---|---|---|
| Test004 | 98.07 | 98.03 | 84.86 | 81.33 | 99.24 |
| Test007 | 92.36 | 89.84 | 85.39 | 80.93 | 96.59 |
Abbreviation: SCADL-ADPW, sine cosine algorithm with deep learning-based anomaly detection in pedestrian walkways.
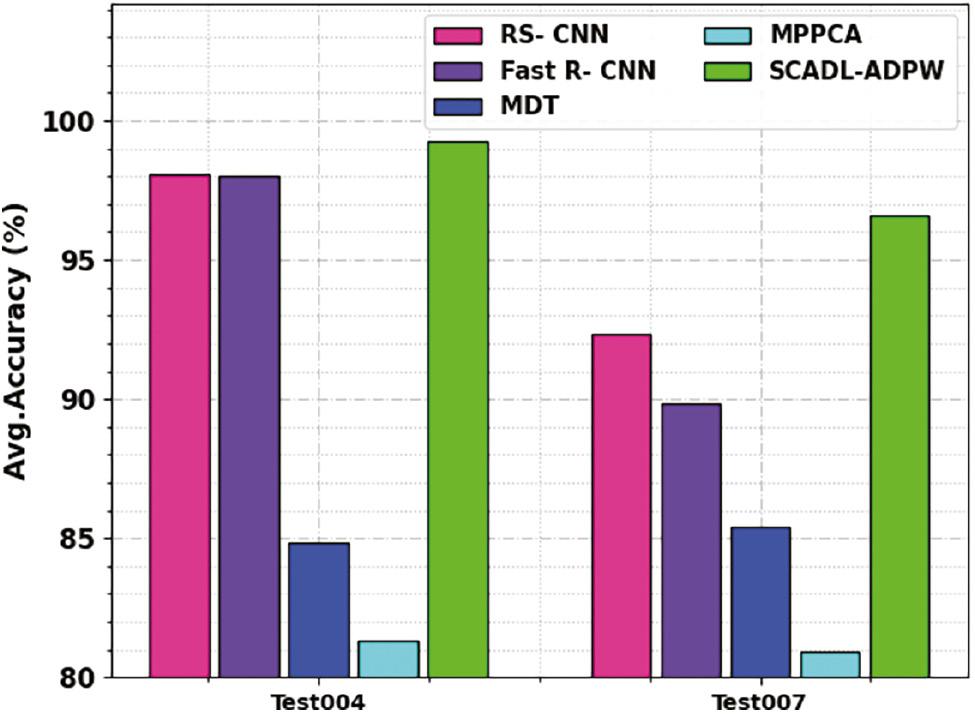
Average accu y outcome of the SCADL-ADPW approach on two datasets. Abbreviation: SCADL-ADPW, sine cosine algorithm with deep learning-based anomaly detection in pedestrian walkways.
These results ensured the effectual anomaly detection performance of the SCADL-ADPW technique.
CONCLUSION
In this manuscript, we have designed a new SCADL-ADPW technique for anomaly detection purposes. The proposed SCADL-ADPW technique identifies the occurrence of anomalies in the pedestrian walkways on remote sensing images. The SCADL-ADPW techniques focus on the identification and classification of anomalies, i.e. vehicles in the pedestrian walkways of VIP. To accomplish this, the SCADL-ADPW technique uses the VGG-16 model for feature vector generation. In addition, the SCA approach is designed for the optimal hyperparameter tuning process. For anomaly detection, the LSTM model can be exploited. The experimental results of the SCADL-ADPW technique are studied on the UCSD anomaly detection dataset. The comparative outcomes stated the improved anomaly detection results of the SCADL-ADPW technique.